벡터 곱 계수 공식에 대한 정리. 외적 - 정의, 속성, 공식, 예 및 솔루션. 점에 대한 힘의 순간 결정
벡터 곱의 개념을 설명하기 전에, 3차원 공간에서 벡터 a →, b →, c → 순서 삼중의 방향에 대한 질문을 살펴보겠습니다.
우선, 한 지점에서 벡터 a → , b → , c → 를 따로 보관해 두겠습니다. 삼중 a → , b → , c → 방향은 벡터 c → 자체의 방향에 따라 오른쪽 또는 왼쪽이 될 수 있습니다. 트리플 a → , b → , c → 유형은 벡터 c → 의 끝에서 벡터 a → 에서 b → 로 가장 짧은 회전이 이루어지는 방향으로 결정됩니다.
가장 짧은 회전이 시계 반대 방향으로 수행되면 벡터 a → , b → , c → 3개가 호출됩니다. 오른쪽, 시계 방향인 경우 - 왼쪽.
다음으로, 두 개의 비공선형 벡터 a → 및 b →를 사용합니다. 그런 다음 점 A에서 벡터 A B → = a → 및 A C → = b →를 플로팅해 보겠습니다. A B → 및 A C → 모두에 동시에 수직인 벡터 A D → = c →를 구성해 보겠습니다. 따라서 벡터 자체 A D → = c →를 구성할 때 한 방향 또는 반대 방향을 제공하는 두 가지 방법으로 이를 수행할 수 있습니다(그림 참조).

벡터 a → , b → , c → 의 순서가 있는 삼중은 우리가 알아낸 바와 같이 벡터의 방향에 따라 오른쪽 또는 왼쪽이 될 수 있습니다.
위에서부터 벡터 곱의 정의를 소개할 수 있습니다. 이 정의은 3차원 공간의 직각 좌표계에 정의된 두 벡터에 대해 제공됩니다.
정의 1
두 벡터 a → 및 b →의 벡터 곱 우리는 3차원 공간의 직각 좌표계에서 정의된 벡터를 다음과 같이 부를 것입니다:
- 벡터 a → 및 b →가 동일선상에 있으면 0이 됩니다.
- 벡터 a → 와 벡터 b → 모두에 수직입니다. 즉, ∠ a → c → = ∠ b → c → = π 2 ;
- 길이는 다음 공식에 의해 결정됩니다. c → = a → · b → · sin ∠ a → , b → ;
- 벡터 a → , b → , c → 3개는 주어진 좌표계와 동일한 방향을 갖습니다.
벡터 a → 및 b →의 벡터 곱은 다음과 같은 표기법을 갖습니다: a → × b →.
벡터 곱의 좌표
모든 벡터에는 좌표계의 특정 좌표가 있으므로 벡터 곱의 두 번째 정의를 도입할 수 있으며, 이를 통해 주어진 벡터 좌표를 사용하여 좌표를 찾을 수 있습니다.
정의 2
3차원 공간의 직각좌표계에서 두 벡터 a → = (a x ; a y ; a z) 및 b → = (b x ; b y ; b z)의 벡터 곱 는 벡터 c → = a → × b → = (a y b z - a z b y) i → + (a z b x - a x b z) j → + (a x b y - a y b x) k → 이라고 하며, 여기서 i → , j → , k →는 좌표 벡터입니다.
벡터 곱은 3차 정사각 행렬의 행렬식으로 표현될 수 있습니다. 여기서 첫 번째 행은 벡터 벡터 i → , j → , k → 를 포함하고, 두 번째 행은 벡터 a → 의 좌표를 포함하며, 세 번째 행은 주어진 직사각형 좌표계에서 벡터 b →의 좌표를 포함하며 이는 행렬의 행렬식입니다. c → = a → × b → = i → j → k → a x a y a z b x b y b z
이 행렬식을 첫 번째 행의 요소로 확장하면 동일성을 얻습니다. c → = a → × b → = i → j → k → a x a y a z b x b y b z = a y a z b y b z · i → - a x a z b x b z · j → + a x a y b x b y · k → = = a → × b → = (a y b z - a z b y) i → + (a z b x - a x b z) j → + (a x b y - a y b x) k →
외적의 속성
좌표의 벡터 곱은 행렬 c → = a → × b → = i → j → k → a x a y a z b x b y b z 의 행렬식으로 표현되는 것으로 알려져 있으며, 행렬 행렬식의 속성다음이 표시됩니다 벡터 제품의 속성:
- 반정환성 a → × b → = - b → × a → ;
- 분배성 a (1) → + a (2) → × b = a (1) → × b → + a (2) → × b → 또는 a → × b (1) → + b (2) → = a → × b (1) → + a → × b (2) → ;
- 연관성 λ a → × b → = λ a → × b → 또는 a → × (λ b →) = λ a → × b →, 여기서 λ는 임의의 실수입니다.
이러한 속성에는 간단한 증명이 있습니다.
예를 들어, 벡터 곱의 반교환 특성을 증명할 수 있습니다.
반정환성 증명
정의에 따르면, a → × b → = i → j → k → a x a y a z b x b y b z 및 b → × a → = i → j → k → b x b y b z a x a y a z 입니다. 그리고 행렬의 두 행이 바뀌면 행렬식의 값이 반대 방향으로 변경되어야 하므로 a → × b → = i → j → k → a x a y a z b x b y b z = - i → j → k → b x b y b z a x a y a z = - b → × a → , 이는 벡터 곱이 반교환적임을 증명합니다.
벡터 제품 - 예제 및 솔루션
대부분의 경우 세 가지 유형의 문제가 있습니다.
첫 번째 유형의 문제에서는 일반적으로 두 벡터의 길이와 그 사이의 각도가 주어지며 벡터곱의 길이를 구해야 합니다. 이 경우 다음 수식을 사용합니다. c → = a → · b → · sin ∠ a → , b → .
실시예 1
a → = 3, b → = 5, ∠ a →, b → = π 4를 알고 있는 경우 벡터 a → 및 b →의 벡터 곱의 길이를 구합니다.
해결책
벡터 a → 및 b →의 벡터 곱의 길이를 결정함으로써 다음 문제를 해결합니다. a → × b → = a → · b → · sin ∠ a → , b → = 3 · 5 · sin π 4 = 15 2 2 .
답변: 15 2 2 .
두 번째 유형의 문제는 벡터의 좌표, 벡터 곱, 길이 등과 관련이 있습니다. 주어진 벡터의 알려진 좌표를 통해 검색됩니다. a → = (a x; a y; a z) 그리고 b → = (b x ; b y ; b z) .
이러한 유형의 문제의 경우 다양한 작업 옵션을 해결할 수 있습니다. 예를 들어 벡터 a → 및 b →의 좌표는 지정할 수 없지만 다음 형식의 좌표 벡터로 확장됩니다. b → = b x · i → + b y · j → + b z · k → c → = a → × b → = (a y b z - a z b y) i → + (a z b x - a x b z) j → + (a x b y - a y b x) k → 또는 벡터 a → 및 b →는 시작 좌표로 지정할 수 있습니다. 그리고 끝점.
다음 예를 고려하십시오.
실시예 2
직각 좌표계에서는 a → = (2; 1; - 3), b → = (0; - 1; 1)의 두 벡터가 제공됩니다. 교차곱을 찾아보세요.
해결책
두 번째 정의에 따르면 주어진 좌표에서 두 벡터의 벡터 곱을 찾습니다. a → × b → = (a y · b z - a z · b y) · i → + (a z · b x - a x · b z) · j → + ( a x · b y - a y · b x) · k → = = (1 · 1 - (- 3) · (- 1)) · i → + ((- 3) · 0 - 2 · 1) · j → + (2 · (- 1) - 1 · 0) · k → = = - 2 i → - 2 j → - 2 k → .
행렬의 행렬식을 통해 벡터 곱을 쓰면 이 예의 해는 다음과 같습니다: a → × b → = i → j → k → a x a y a z b x b y b z = i → j → k → 2 1 - 3 0 - 1 1 = - 2 i → - 2 j → - 2 k → .
답변: a → × b → = - 2 i → - 2 j → - 2 k → .
실시예 3
벡터 i → - j → 및 i → + j → + k →의 벡터 곱의 길이를 구합니다. 여기서 i →, j →, k →는 직사각형 직교 좌표계의 단위 벡터입니다.
해결책
먼저, 주어진 직사각형 좌표계에서 주어진 벡터 곱 i → - j → × i → + j → + k →의 좌표를 구해 보겠습니다.
i → - j → 및 i → + j → + k → 벡터는 각각 (1; - 1; 0) 및 (1; 1; 1) 좌표를 갖는 것으로 알려져 있습니다. 행렬의 행렬식을 사용하여 벡터 곱의 길이를 구하면 i → - j → × i → + j → + k → = i → j → k → 1 - 1 0 1 1 1 = - i → - j → + 2 k → .
따라서 벡터 곱 i → - j → × i → + j → + k →는 주어진 좌표계에서 (- 1 ; - 1 ; 2) 좌표를 갖습니다.
공식을 사용하여 벡터 곱의 길이를 찾습니다(벡터 길이 찾기 섹션 참조). i → - j → × i → + j → + k → = - 1 2 + - 1 2 + 2 2 = 6.
답변: i → - j → × i → + j → + k → = 6 . .
실시예 4
직사각형 직교 좌표계에서는 세 점 A(1, 0, 1), B(0, 2, 3), C(1, 4, 2)의 좌표가 제공됩니다. A B → 및 A C →에 수직인 벡터를 동시에 찾습니다.
해결책
벡터 A B → 및 A C →는 각각 다음과 같은 좌표 (- 1 ; 2 ; 2) 및 (0 ; 4 ; 1)을 갖습니다. 벡터 A B → 및 A C →의 벡터 곱을 찾았으므로 정의상 A B → 및 A C → 모두에 수직인 벡터, 즉 문제에 대한 해결책임이 분명합니다. A B → × A C → = i → j → k → - 1 2 2 0 4 1 = - 6 i → + j → - 4 k → .
답변: - 6 i → + j → - 4 k → . - 수직 벡터 중 하나입니다.
세 번째 유형의 문제는 벡터의 벡터 곱의 속성을 사용하는 데 중점을 둡니다. 이를 적용한 후 주어진 문제에 대한 해결책을 얻게 됩니다.
실시예 5
벡터 a →와 b →는 수직이고 길이는 각각 3과 4입니다. 벡터 곱의 길이를 구합니다. 3 a → - b → × a → - 2 b → = 3 a → × a → - 2 b → + - b → × a → - 2 b → = = 3 a → × a → + 3 · a → × - 2 · b → + - b → × a → + - b → × - 2 · b → .
해결책
벡터 곱의 분배 특성에 따라 3 a → - b → × a → - 2 b → = 3 a → × a → - 2 b → + - b → × a → - 2 b → = = 3이라고 쓸 수 있습니다. a → × a → + 3 a → × - 2 b → + - b → × a → + - b → × - 2 b →
연관성의 특성에 따라 마지막 표현식의 벡터 곱의 부호에서 수치 계수를 가져옵니다. 3 · a → × a → + 3 · a → × - 2 · b → + - b → × a → + - b → × - 2 · b → = = 3 · a → × a → + 3 · (- 2) · a → × b → + (- 1) · b → × a → + (- 1) · (- 2) · b → × b → = = 3 a → × a → - 6 a → × b → - b → × a → + 2 b → × b →
벡터 곱 a → × a → 및 b → × b →는 0과 같습니다. a → × a → = a → · a → · sin 0 = 0 및 b → × b → = b → · b → · sin이기 때문입니다. 0 = 0이면 3 · a → × a → - 6 · a → × b → - b → × a → + 2 · b → × b → = - 6 · a → × b → - b → × a → . .
벡터 곱의 반교환성으로부터 다음과 같습니다 - 6 · a → × b → - b → × a → = - 6 · a → × b → - (- 1) · a → × b → = - 5 · a → × 비 → . .
벡터 곱의 속성을 사용하여 3 · a → - b → × a → - 2 · b → = = - 5 · a → × b → 등식을 얻습니다.
조건에 따라 벡터 a → 및 b →는 수직입니다. 즉, 이들 사이의 각도는 π 2와 같습니다. 이제 남은 것은 발견된 값을 적절한 공식으로 대체하는 것입니다: 3 a → - b → × a → - 2 b → = - 5 a → × b → = = 5 a → × b → = 5 a → b → · sin (a → , b →) = 5 · 3 · 4 · sin π 2 = 60 .
답변: 3 a → - b → × a → - 2 b → = 60.
정의에 따라 벡터의 벡터 곱의 길이는 a → × b → = a → · b → · sin ∠ a → , b → 와 같습니다. 이미 알려져 있기 때문에 ( 학교 과정) 삼각형의 면적은 두 변의 길이에 두 변 사이의 각도의 사인을 곱한 값의 절반과 같습니다. 결과적으로, 벡터 곱의 길이는 평행사변형의 면적과 같습니다 - 이중 삼각형, 즉 사인에 의해 한 점에서 내려진 벡터 a → 및 b → 형태의 변의 곱 그들 사이의 각도 sin ∠ a →, b →.
이것은 벡터 제품의 기하학적 의미입니다.

벡터 생성물의 물리적 의미
물리학의 한 분야인 역학에서는 벡터 곱 덕분에 공간의 한 점을 기준으로 힘의 모멘트를 결정할 수 있습니다.
정의 3
점 A를 기준으로 점 B에 힘 F →가 가해지는 순간, 우리는 다음과 같은 벡터 곱 A B → × F →를 이해할 것입니다.
텍스트에 오류가 있으면 강조 표시하고 Ctrl+Enter를 누르세요.
세 가지 벡터의 혼합체와 그 특성
혼합 작업세 개의 벡터를 와 같은 숫자라고 합니다. 지정 ![]() . 여기서는 처음 두 벡터에 벡터 방식으로 곱한 다음 결과 벡터에 세 번째 벡터를 스칼라 방식으로 곱합니다. 분명히 그러한 제품은 특정 숫자입니다.
. 여기서는 처음 두 벡터에 벡터 방식으로 곱한 다음 결과 벡터에 세 번째 벡터를 스칼라 방식으로 곱합니다. 분명히 그러한 제품은 특정 숫자입니다.
혼합 제품의 특성을 고려해 봅시다.
- 기하학적 의미혼합 작업. 부호까지 3개 벡터의 혼합 곱은 모서리에서와 같이 이러한 벡터를 기반으로 만들어진 평행육면체의 부피와 같습니다. .
따라서,
 .
.
증거. 벡터를 제쳐두자 공통의 시작그리고 그 위에 평행육면체를 만들어 보세요. 를 표시하고 주목해 봅시다. 스칼라 곱의 정의에 따라
라고 가정하고 다음과 같이 표시한다. 시간평행육면체의 높이를 구하세요.
따라서 언제
그렇다면 그렇습니다. 따라서, .
이 두 가지 경우를 결합하면 또는 을 얻습니다.
특히 이 속성의 증명에서 벡터의 삼중이 우향적이면 혼합 곱은 이고, 좌향적이면 이라는 결론이 나옵니다.
- 모든 벡터에 대해 , 등식은 참입니다.
이 속성의 증명은 속성 1에서 따릅니다. 실제로 와 를 증명하는 것은 쉽습니다. 또한 "+"와 "-" 기호는 동시에 사용됩니다. 벡터 와 , 와 사이의 각도는 모두 예각이자 둔각입니다.
- 두 가지 요소를 재배열할 때 혼합 작업기호가 변경됩니다.
실제로 혼합 제품을 고려하면 예를 들어
- 요인 중 하나가 0이거나 벡터가 동일 평면에 있는 경우에만 혼합 곱입니다.
증거.
따라서 3개 벡터의 동일 평면성에 대한 필요충분조건은 혼합곱이 0이 된다는 것입니다. 또한, 3개의 벡터가 공간에서 기저를 형성하는 경우는 다음과 같습니다.
벡터가 좌표 형식으로 제공되면 혼합 곱이 다음 공식으로 구해지는 것을 볼 수 있습니다.
 .
.따라서 혼합 곱은 첫 번째 줄에 첫 번째 벡터의 좌표, 두 번째 줄에 두 번째 벡터의 좌표, 세 번째 줄에 세 번째 벡터의 좌표를 갖는 3차 행렬식과 같습니다.
예.
공간의 분석 기하학
방정식 F(x, y, z)= 0은 공간에서 정의합니다. 옥시즈일부 표면, 즉 좌표가 있는 점의 기하학적 궤적 x, y, z이 방정식을 만족시키세요. 이 방정식을 표면 방정식이라고 하며, x, y, z– 현재 좌표.
그러나 종종 표면은 방정식으로 지정되지 않고 하나 또는 다른 속성을 갖는 공간의 점 집합으로 지정됩니다. 이 경우 기하학적 특성을 바탕으로 표면의 방정식을 찾는 것이 필요합니다.
비행기.
일반 평면 벡터.
주어진 점을 통과하는 평면의 방정식
공간에서 임의의 평면 σ를 생각해 봅시다. 위치는 이 평면에 수직인 벡터와 일부 고정점을 지정하여 결정됩니다. M0(x 0, 와이 0, z 0), σ 평면에 놓여 있습니다.
평면 σ에 수직인 벡터를 호출합니다. 정상이 평면의 벡터입니다. 벡터에 좌표가 있다고 가정합니다.
이 점을 통과하는 평면 σ의 방정식을 유도해 보겠습니다. M0그리고 법선 벡터를 가집니다. 이렇게 하려면 평면 σ에서 임의의 점을 선택합니다. M(x, y, z)그리고 벡터를 고려해보세요.
어떤 지점에서든 중О σ는 벡터이므로 스칼라 곱은 0과 같습니다. 이 평등은 요점이 조건입니다 중О σ. 이 평면의 모든 점에 대해 유효하며 점이 시작되자마자 위반됩니다. 중σ평면 밖에 있을 것이다.
점을 반경 벡터로 표시하면 중, – 점의 반경 벡터 M0이면 방정식은 다음과 같은 형식으로 작성될 수 있습니다.
이 방정식은 벡터평면 방정식. 좌표형으로 쓰자. 그 이후로
그래서 우리는 이 점을 통과하는 평면의 방정식을 얻었습니다. 따라서 평면의 방정식을 만들려면 법선 벡터의 좌표와 평면 위에 있는 어떤 점의 좌표를 알아야 합니다.
평면의 방정식은 현재 좌표에 대한 1차 방정식이라는 점에 유의하세요. 엑스, 와이그리고 지.
예.
평면의 일반 방정식
데카르트 좌표에 관한 모든 1차 방정식이 표시될 수 있습니다. x, y, z특정 평면의 방정식을 나타냅니다. 이 방정식은 다음과 같이 작성됩니다.
도끼+By+Cz+D=0
그리고 호출된다 일반 방정식평면과 좌표 에이,비,씨여기에 평면의 법선 벡터의 좌표가 있습니다.
특별한 경우를 생각해 보자 일반 방정식. 방정식의 하나 이상의 계수가 0이 되는 경우 평면이 좌표계를 기준으로 어떻게 위치하는지 알아 보겠습니다.
A는 축의 평면에 의해 절단된 세그먼트의 길이입니다. 황소. 마찬가지로, 다음과 같이 표시될 수 있습니다. 비그리고 기음– 축에서 고려 중인 평면에 의해 절단된 세그먼트의 길이 아야그리고 온스.
평면을 구성하기 위해 세그먼트 단위의 평면 방정식을 사용하는 것이 편리합니다.
7.1. 외적의 정의
표시된 순서대로 취해진 세 개의 비공동선 벡터 a, b 및 c는 세 번째 벡터 c의 끝에서 첫 번째 벡터 a에서 두 번째 벡터 b까지의 최단 회전이 다음과 같이 보이면 오른쪽 삼중선을 형성합니다. 반시계방향이고, 시계방향이면 왼손 삼중선이다(그림 .16 참조).
벡터 a와 벡터 b의 벡터 곱을 벡터 c라고 하며, 이는 다음과 같습니다.
1. 벡터 a와 b에 수직입니다. 즉, c ^ a와 c입니다. ^ 비;
2. 벡터 a에 구성된 평행사변형의 면적과 수치적으로 동일한 길이를 가집니다.비측면과 마찬가지로 (그림 17 참조), 즉
3. 벡터 a, b, c는 오른쪽 트리플을 형성합니다.


외적은 a x b 또는 [a,b]로 표시됩니다. 단위 벡터 i 사이의 다음 관계는 벡터 곱의 정의에서 직접적으로 따릅니다. j 그리고케이
(그림 18 참조):
i x j = k, j x k = i, k x i = j.예를 들어 다음을 증명해보자.
나는 xj=k. ^ 1) k^i,k
j ; 2) |k |=1이지만 |나는 x j
| = |나는 | 그리고|J | 죄(90°)=1;
3) 벡터 i, j 및
오른쪽 트리플을 형성합니다(그림 16 참조).
7.2. 외적의 속성 = -(1. 요인을 재배열하면 벡터 곱의 부호가 변경됩니다.).
그리고 xb =(bxa)(그림 19 참조).
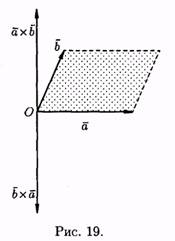
벡터 a xb와 b xa는 동일 선상에 있고 동일한 모듈을 갖지만(평행사변형의 영역은 변경되지 않음) 방향이 반대입니다(삼중 a, b, a xb 및 a, b, b x a 반대 방향). 그러므로 도끼 bxa 비 2. 벡터 곱은 스칼라 인수와 관련하여 결합 속성을 갖습니다. 즉, l (a xb) = (l a) x b = a x (l b). 비 l >0이라고 하자. 벡터 l(a xb)은 벡터 a 및 b에 수직입니다. 벡터( 도끼엘 도끼도끼 도끼 bxa 비는 또한 벡터 a에 수직이고
(벡터 a, 도끼그러나 같은 비행기에 누워 있습니다). 이는 벡터가 도끼 xb. 에 대해서도 비슷한 방식으로 증명된다. 도끼<0.
3. 0이 아닌 두 벡터 a와 비벡터 곱이 0 벡터와 동일한 경우에만 동일 선상에 있습니다. 즉, a ||b<=>그리고 xb=0입니다.

특히, i *i =j *j =k *k =0 입니다.
4. 벡터 곱은 다음과 같은 분포 속성을 갖습니다.
(a+b) xc = xc + 비 xs.
증거 없이 받아들이겠습니다.
7.3. 외적을 좌표로 표현하기
우리는 벡터 i의 외적 테이블을 사용할 것입니다. 단위 벡터 i 사이의 다음 관계는 벡터 곱의 정의에서 직접적으로 따릅니다.그리고 k:

첫 번째 벡터에서 두 번째 벡터까지의 최단 경로 방향이 화살표 방향과 일치하면 곱은 세 번째 벡터와 같습니다. 일치하지 않으면 세 번째 벡터에 빼기 기호가 사용됩니다.
두 벡터 a =a x i +a y가 주어졌다고 가정합니다. 단위 벡터 i 사이의 다음 관계는 벡터 곱의 정의에서 직접적으로 따릅니다.+az 그리고그리고 b =bx 나+by 단위 벡터 i 사이의 다음 관계는 벡터 곱의 정의에서 직접적으로 따릅니다.+bz 그리고. (벡터 곱의 속성에 따라) 다항식으로 곱하여 이러한 벡터의 벡터 곱을 찾아보겠습니다.

![]()
결과 공식은 더욱 간단하게 작성할 수 있습니다.

왜냐하면 평등(7.1)의 우변은 첫 번째 행의 요소에 대한 3차 행렬식의 확장에 해당하기 때문입니다. 평등(7.2)은 기억하기 쉽습니다.
7.4. 외적의 일부 응용
벡터의 공선성 설정

평행사변형과 삼각형의 넓이 구하기
벡터의 벡터 곱의 정의에 따르면 에이그리고 b |xb | =|아 | * |b |sing g, 즉 S 쌍 = |a x b |. 따라서 D S =1/2|a x b |입니다.
점에 대한 힘의 순간 결정
A점에 힘을 가하자 F =AB그리고 보자 에 대한- 공간의 어떤 지점(그림 20 참조)

물리학에서 다음과 같이 알려져 있습니다. 힘의 순간 에프 점에 비해 에 대한벡터라고 불림 중,그 지점을 통과하는 것은 에 대한그리고:
1) 점을 통과하는 평면에 수직 오, A, B;
2) 팔당 힘의 곱과 수치적으로 동일
3) 벡터 OA와 A B를 사용하여 오른쪽 트리플을 형성합니다.
따라서 M = OA x F입니다.
선형 회전 속도 찾기
속도 다섯각속도로 회전하는 강체의 점 M 승고정 축 주위의 는 오일러의 공식 v =w xr에 의해 결정됩니다. 여기서 r =OM, 여기서 O는 축의 일부 고정 지점입니다(그림 21 참조).

정의. 벡터 a와 벡터 b의 벡터 곱은 기호 [α, b](또는 l x b)로 표시되는 벡터입니다. 따라서 1) 벡터 [a, b]의 길이는 (p입니다. 여기서 y는 벡터 a와 b 사이의 각도(그림 31) 2) 벡터 [a, b)는 벡터 a와 b에 수직입니다. 이 벡터의 평면에 수직입니다. 3) 벡터 [a, b]는 이 벡터의 끝에서 a에서 b까지의 가장 짧은 회전이 시계 반대 방향으로 발생하는 방식으로 향합니다(그림 32). 쌀. 32 그림 31 즉, 벡터 a, b 및 [a, b)는 벡터의 오른쪽 삼중항을 형성합니다. 즉, 오른손의 엄지, 검지, 중지와 같은 위치에 있다. 벡터 a와 b가 동일선상에 있으면 [a, b] = 0이라고 가정합니다. 정의에 따라 벡터 곱의 길이는 곱해진 평행사변형(그림 33)의 면적 Sa와 수치적으로 동일합니다. 벡터 a와 b를 변으로 사용: 6.1 . 벡터 곱의 속성 1. 벡터 곱은 곱해진 벡터 중 적어도 하나가 0이거나 이러한 벡터가 동일 선상에 있는 경우에만(벡터 a와 b가 동일 선상에 있으면 두 벡터 사이의 각도는) 0 벡터와 같습니다. 0 또는 7r). 삼각형의 면적을 찾으십시오 (그림 36). 삼각형 OAO의 면적 b"d는 평행사변형 O AC B의 면적 S의 절반과 같다는 것이 분명합니다. 벡터 a = OA 및 b = ob의 벡터 곱(a, b|)을 계산하면 다음을 얻습니다. 참고: 벡터 곱은 결합적이지 않습니다. 즉, 일반적인 경우에는 동등성((a, b),c) = [a, |b,c))이 참이 아닙니다. 7. 벡터의 혼합 곱 벡터 a, b, c와 1> 벡터를 곱하면 벡터 [a, 1>]를 벡터 c로 곱해 보겠습니다. ), c). 숫자 ([a, b], e)는 벡터 a, b의 혼합 곱이라고 하며 기호 (a, 1)로 표시됩니다. 벡터 a, b 및 c는 다음과 같습니다. 이 경우 동일 평면이라고 함), 혼합 곱([a, b], c) = 0입니다. 이는 벡터 [a, b|가 벡터 a와 1이 있는 평면에 수직이라는 사실에서 비롯됩니다. ", 따라서 벡터 c에 적용됩니다. / 점 O, A, B, C가 동일한 평면에 있지 않으면(벡터 a, b 및 c는 동일 평면에 있지 않음) OA 모서리에 평행육면체를 구성합니다. OB와 OS(그림. 38a). 벡터 곱의 정의에 따르면 (a,b) = So c가 있습니다. 여기서 So는 평행사변형 OADB의 면적이고 c는 벡터 a와 b에 수직인 단위 벡터이며 트리플 a , b, c는 오른손잡이입니다. 벡터 a, b, c는 각각 오른손의 엄지, 검지, 중지로 위치한다(그림 38b). 오른쪽의 마지막 등식의 양쪽에 벡터 c를 스칼라로 곱하면 좌표로 지정된 벡터의 벡터 곱을 얻습니다. 혼합 작업. 숫자 pc c는 구성된 평행육면체의 높이 h와 같습니다. 벡터 c와 c 사이의 각도가 예각(삼중 a, b, c - 오른쪽)인 경우 "+" 기호를 사용하고 "-"를 사용하여 취합니다. 각도가 둔각(삼중 a, b, c - 왼쪽)인 경우 부호를 지정합니다. 따라서 벡터 a, b 및 c의 혼합 곱은 모서리와 마찬가지로 이러한 벡터를 기반으로 하는 평행육면체의 부피 V와 같습니다. a, b, c 트리플이 오른쪽이고, a, b, c 트리플이 왼쪽이면 -V입니다. 혼합 곱의 기하학적 의미에 기초하여 동일한 벡터 a, b 및 c를 다른 순서로 곱하면 항상 +7 또는 -K를 얻게 된다는 결론을 내릴 수 있습니다. 제조사 마크 그림. 38 참조는 곱해진 벡터가 어떤 종류의 삼중 형태(오른쪽 또는 왼쪽)를 형성하는지에만 의존합니다. 벡터 a, b, c가 오른쪽 트리플을 형성하면 트리플 b, c, a 및 c, a, b도 오른쪽이 됩니다. 동시에 세 개의 트리플 b, a, c 모두; a, c, b 및 c, b, a - 왼쪽. 따라서 (a,b, c) = (b,c, a) = (c,a,b) = -(b,a,c) = -(a,c,b) = -(c,b , 에이). 벡터의 혼합 곱은 곱해진 벡터 a, b, c가 동일 평면에 있는 경우에만 0과 동일하다는 점을 다시 강조합니다. (a, b, c는 동일 평면에 있음) 7.2. 좌표의 혼합곱 벡터 a, b, c를 i, j, k를 기준으로 한 좌표로 지정합니다. a = (x\,y\,z]), b= (x2,y2>z2), c = (x3, uz, 23). 혼합된 생성물(a, b, c)에 대한 표현을 찾아보겠습니다. 우리는 3차 행렬식과 동일한 기저 i, J, k의 좌표로 지정된 벡터의 혼합 곱을 가지며, 그 선은 각각 곱해진 벡터의 첫 번째, 두 번째 및 세 번째 좌표로 구성됩니다. 벡터 a y\, Z|), b = (хъ У2.22), с = (жз, з, 23)의 동일 평면성에 대한 필요충분조건은 다음 형식 У|로 작성됩니다. z, ag2 y2 -2 =0. 예를 들어요. 벡터 " = (7,4,6), b = (2, 1,1), c = (19, II, 17)이 동일 평면에 있는지 확인하십시오. 벡터 a와 I를 기반으로 한 평행사변형을 기본으로 삼은 경우, 벡터 a = 31 + 2j - 5k, b = i- j + 4knc = i-3j + k를 기반으로 한 평행육면체의 높이 h를 계산합니다. 답변





